| |
лета на перекладине и брусьях. Как правило, это перелег Ткачева, сальто Делчева и сальто вперед в вис в различных вариантах. Успешному освоению этих элементов обычно мешает боязнь получить травму или трудность преодоления этого чувства в результате уже полученной травмы. Гимнастика дорого ценит сложность и жестоко наказывает за ошибки. Неудачные попытки (особенно на начальных этапах обучения) нередко бывают причиной прекращения активных занятий.
В связи с этим задача разработки новых эффективных методических приемов быстрого и высококачественного обучения сложным элементам весьма актуальна. С этой целью нами был разработан тренажер, реализованный в рабочем варианте на перекладине.
Предполагалось, что принудительное воспроизведение оптимальной для конкретных индивидуумов траектории базовой точки в облегченных условиях на тренажере позволит минимизировать ошибки; увеличивая объем и интенсивность тренировки, снизить травмоопасность обучения и за счет этого оптимизировать процесс формирования требуемого двигатель-лого навыка по таким критериям, как быстрота, качество и прочность освоения с перспективой дальнейшего усложнения элемента.
В условиях обычного обучения элементам-трюкам гимнаст с помощью тренера находит оптимальную траекторию полета методом проб и ошибок, а затем стабилизирует соответствующий навык. Конструкция тренажера, позволяя полнее анализировать дидактические принципы, обеспечивает выведение гимнаста сразу на оптимальную траекторию полета с быстрой стабилизацией требуемого навыка.
В известных тренажерах (например, обучающая машина адаптивного типа Э. В. Гостева и Н. Г. Сучилина) траектория базовой точки материализована для движений, выполняемых на опоре. При этом за эталон принималась траектория базовой точки одного из лучших исполнителей элемента.
В предлагаемом тренажере она материализована как для опорного, так и для безопорного периодов движения. При этом оптимальная траектория определяется с учетом антропометрических особенностей обучаемых. Конструкция тренажера предусматривает его индивидуальную настройку. Было проведено математическое моделирование физических упражнений со стабилизированной кинематической структурой (В. Т. Назаров, 1974) с использованием аппарата волновой биомеханики (Ф. К. Агашин, 1977). Построенная с помощью ЭВМ ЕС модель численной минимизации типовой ошибки* программы ориентации позволила определить оптимальную траекторию движения ОЦТ
* Типовая ошибка математически представляет собой целевой кинематический функционал гимнастических элементов на перекладине с фазой полета.
|
|
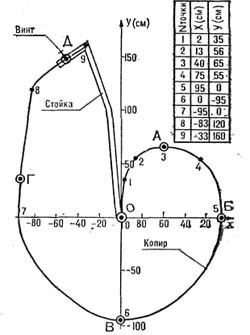
и приближенной к ней базовой точки. Особенность предлагаемого тренажера заключается в автоматизированном проектировании его основных параметров на ЭВМ с учетом индивидуальной антропомоторики гимнастов. В качестве конкретной модели оптимизации был! взяты средние антропометрические параметры гимнастов 11 — 13 лет, тренирующихся по II разряду, с типичным диапазоном росто-весовых показателей. Оптимизация проводилась на ЭВМ ЕС-1033 для сальто Делчева и сальто вперед в вис. Вычисленная с помощью ЭВМ оптимальная траектория (рис. 1) материализована в тренажере (рис. 2), на котором проведены педагогические эксперименты по обучению юношей 12 лет, тренирующихся по II разряду, сальто вперед в вис, сальто Делчева с двух и с одной руки.
В результате экспериментов выявлено, что применение тренажера в экспериментальной группе позволило 12-летним гимнастам увеличить объем работы в процессе обучения указанным элементам в среднем в 3,4 раза; уменьшить сроки обучения — в 2 раза, надежность выполнения — в 2,6 раза по сравнению с 15-лет-ними гимнастами, осваивавшими эти же элементы по сложившейся методике.
Был также проведен педагогический эксперимент по обучению юных гимнастов 6 — 7 лет сальто вперед и назад из виса. Для этого проведена коррекция траектории путем соответствующей настройки тренажера. Не описывая подробно ход и результаты педагогических экспериментов (это не цель данной статьи), отметим лишь, что они положительны и достоверны. Рабочая гипотеза подтвердилась.
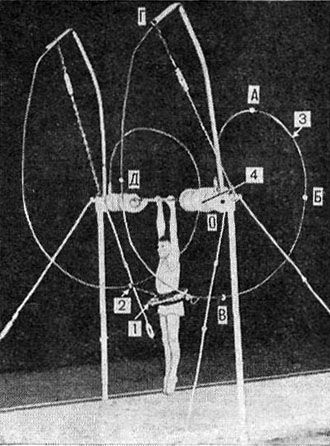
Устройство тренажера. Конструкция тренажера представлена на рис. 2.
Тренажер состоит из обычного страховочного пояса (1), который с помощью веревок и резинового бинта крепится к кольцам из фторопласта (2), надетым на копиры с гладкой поверхностью (3), форма которых соответствует расчетной оптимальной траектории движения ОЦМ. Копиры изготовляются из круглого прутка пружинной стали длиной 6,5 м, диаметром 20 — 22 мм. Фиксация копиров на перекладине осуществляется с помощью замков. Копиры закрепляются в замке плотно, без люфтов. Резиновый винт предназначен для устранения провисания веревок и отставания кольца при скольжении его по копиру. В фазе полета страховочные веревки должны быть полностью натянуты между копирами. Внутренний диаметр фторопластовых колец на 5 — 8 мм больше диаметра копиров; внешний диаметр колец больше внутреннего на 10 — 15 мм. Кольца можно изготовить из фторопласта, капронита и любого другого материала с низким коэффициентом трения и высокой прочностью.
Для уменьшения трения поверхность копиров покрывается смазкой. Для большей уве- |
|